TADANO Telescopic View
News | Sitemap | Contact Us
![]()

![]()
June 9, 2009
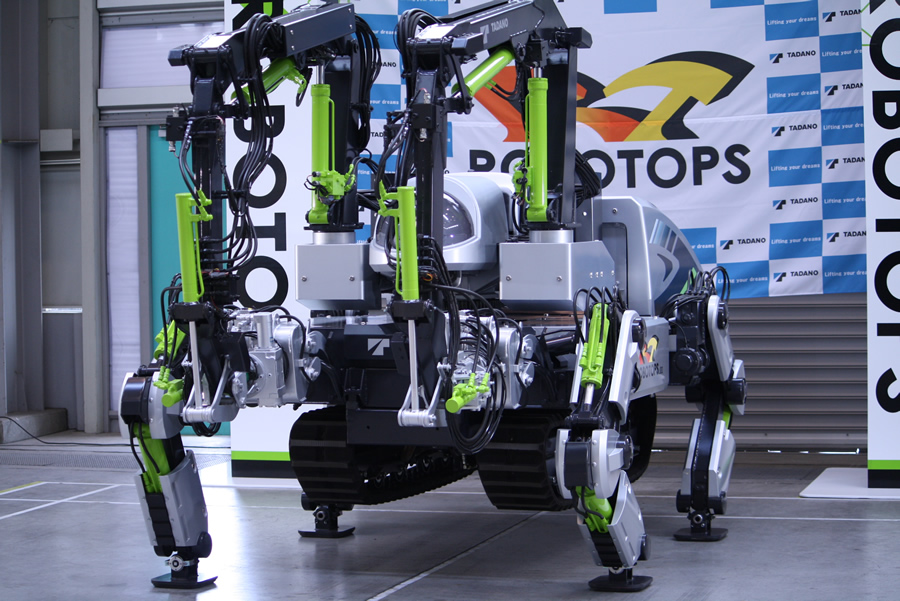
On May 26, we unveiled to the press the industry's first four-legged dual-armed robot, which integrates the structural, hydraulic and electronic control technologies we have developed over many years in the crane and other industries.
We conduct our business activities under the corporate motto of "Creation, Contribution, Cooperation," and last year celebrated the 60th anniversary of our foundation thanks to the support of our customers. Building on this history, we pooled the structural, hydraulic and electronic control technologies we have acquired through the development of cranes (namely, crane mechanisms, cylinders, and movement and load control systems), and applied them to developing a robot.
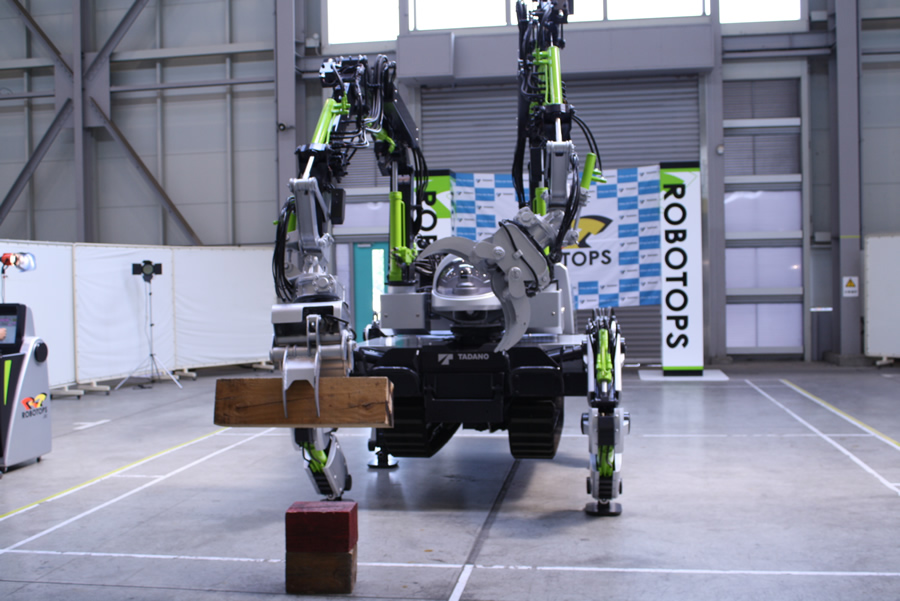
Robotops took two years to design and a further year to develop. It employs a movement control system developed through a joint research project with Okayama University, making the first-ever crane that is able to walk. This concept machine truly embodies the possibilities offered by the cranes of the future. Although there are currently no plans to commercialize the design, we plan to apply and utilize the technologies of this robot in the development of our future products.
ROBOTOPS, the Crane of the Future
The name is a combination of the word "robot" with the ending "-tops", often found in the names of dinosaurs. This was the name for the project during its development, and we plan to select a nickname for the robot through an internal poll.
 ROBOTOPS The Crane of the Future |
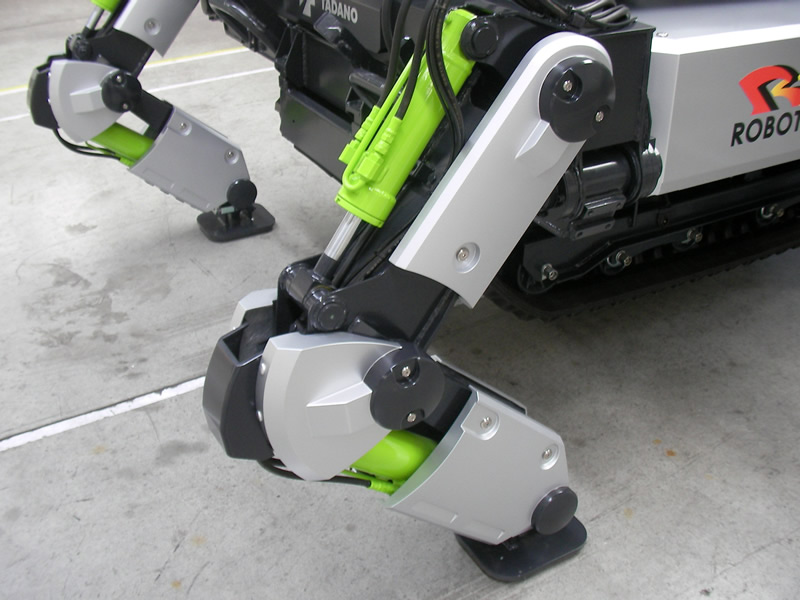
Height: 2.1 m (when stored) Total Width: 2.1 m (when stored) Total Length: 3.84 m (when stored) Weight: 2.7 t Number of joints: Total 29 (Hands: 6, Arms: 6, Shoulder pivots: 2, Body pivot: 1, Legs: 12, Treads: 2) Lifting capacity: 100 kg x 2 (both clamps) Optical devices: 3 CCD cameras (1 on each hand, 1 in center of body) Operating system: Joystick-operated remote control |
*Click the thumbnail-size image to see the full-size image.
 |
 |
 |
 |
 |
 |
 |
 |
 |
Large size(16.1MB) / Small size(6.9MB)
*Windows Media Player is required to watch this movie files.